Vecteurs contravariants et covariants
On se donne un espace R-euclidien E et une base quelconque ci (i=0,1,2,...,n). On pose:
ci.cj = gij ('.' = produit scalaire)
gij = (gij)-1 l'inverse de gij
et
pour ne pas alourdir l'écriture on écrit simplement (convention d'd'Einstein)
On somme quand l'indice-haut=indice-bas et on utilise les lettres grecs pour l'indice de sommation si ça donne plus de lisibilité.
on a:
Un vecteur A s'exrpime dans la base ci:
Les Ai sont des composantes contravariantes de A
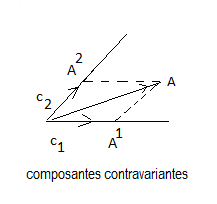
Au lieu de projeter paralèllement sur les axes , on peut projeter perpendiculairement comme indique la figure ci-dessous
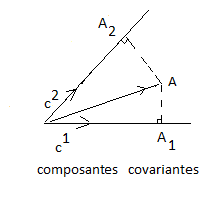
Les Ai sont des composantes covariantes de A
Un simple calcul nous donne les composantes covariantes de A:
A = Aici
A.ck = Aici. ck
A.ck = Ai giα cα . ck
A.ck = Ai giα gkα
Mais quand i=k on a gkα gkα=1, zéro 0 sinon
d'où
A.ck = Ak
Par abuse de langage on dit que Ai est un vecteur contravariant et Ai un vecteur covariant, au lieu des composantes d'un vecteur.
La base ci est la base covariante et ci la base contravariant associé à ci
Changement de base
Soit c'i une nouvelle base , donnée par:
ou
Le Pij est la matrice de passage de la base c'i → ci et
Le Qij est la matrice de passage de la base ci → c'i
et on a:
où
Voyons maintenant comment un vecteur contravariant Ai se transforme en A'i
d'où
en changeant les indices
de même
d'où
en changeant les indices
Voyons pour un vecteur covariant Ai
d'où
Ai se transforme en A'i suivant la règle:
résumé:
[1] 2 3 4 5 6
Accueil
DMJ: 19/07/2018