L' espace de Riemann
Considèrons une surface V paramétrée par un système de coordonnées curvilignes xi , on plonge cette surface dans l' espace euclidien Rn+1. Si on désigne uk les coordonnées cartésiennes usuelles d'un point M(u0,u1, ...,un) de Rn+1, le plongement implique qu'on aie les relations suivantes:
uk = uk (x0,x1, ...,xn)
les coordonnées cartésiennes sont en fonctions des coordonnées curvilignes, et le point M(u0,u1, ...,un) devient M(x0,x1, ...,xn)
La donnée d'une surface V c'est la donnée de son paramétrage xi, cad la donnée de n fonctions fk(x0,x1, ...,xn) de variables xi telles que
uk = fk (x0,x1, ...,xn) mais par abuse de langage on écrit
uk = uk (x0,x1, ...,xn) pour dire que les uk sont en fonction des xi
uk = uk (xi)
nous allons maintenant voir quelle est la forme de la métrique ds² de V.
on a:
duk = ∂α(uk) dxα
ds² = (du0)² + (du1)² + ...+(dun)² ; on est dans l'environnement de V qui est Rn+1
en développant ça donne
ds² = gα β dxαdxβ
où gα β(x0,x1, ...,xn) sont des fonctions de xi le paramétrage de V, grâce au plongement on a pu définir le ds² de V.
on a
dM = ∂M/∂xα dxα
si on pose
ei = ∂M/∂xi = ∂iM le répère (M, ei) s'appelle repère locale (ou naturel) de V en M , ei s'appelle base covariante en M. Les vecteurs ei engendrent un esv TM nommé l'espace tangente de V en M, et on voit que
gi j = ei . ej produit scalaire
et
dxi = coordonnées de dM dans la base ei
en effet
dM = dxi ei
dM.dM = dM² = dxi ei dxj ej
or
dM² = ds² donc gi j = ei . ej
Le couple (V,ds²) avec
ds² = gα β dxαdxβ
où gα β(x0,x1, ...,xn) sont des fonctions de xi le paramétrage de V
constitue un exemple d'un espace de Riemann
Note
On démontre que le ds² ne dépend pas du paramétrage xi de V , il est propre, intrinsèque à V.
Composantes contravariantes et covariantes
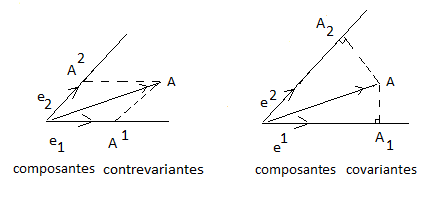
Pour un vecteur A de TM on peut le répèrer par (A0,A1, ...,An) mais aussi par A = (A0,A1, ...,An) on a donc:
A = Aα eα et A = Aα eα
et
Ai = A.ei (par définition de Ai)
d'où
Ai =Aα eα .ei
donc
Ai = giαAα
ou encore
Ai = giαAα
gij est la matrice inverse de gij :
de même
A = Ai ei = giαAα ei
d'où
eα = giαei
à chaque base covariante ei on associe une base contravariante ei de façon suivante:
ei = giαeα
et
A = Aα eα
Les composantes Ai se nomment contravariant et Ai covariant du vecteur A.
Au lieu de prendre une surface on prend une variété (plusieurs morceaux de surfaces collées , chaque morceau est gèré par un système de coordonnées curvilignes)
donc pour un morceau de la variété on tombe sur le cas précédant càd un morceau de surface paramétrée
par un système de coordonnées curvilignes xi reliant aux coordonnées cartésiennes uk.
uk = uk (x0,x1, ...,xn)
à partir de là on trouve la métrique ds² de V et les gij .
On a plongé V dans l' esv euclidien Rn , la métrique de Rn , δij (ds² = δα β duαduβ) et la métrique de V , gij sont reliées par:
gij = δαβ ∂iuα ∂juβ
(*)
En fait, on peut définir un espace de Riemann, sans passer par le plongement, on se donne simplement une variété V et sa métrique gij sans l'obligation de férifier (*) mais doit vérifier quand même un certain nombre de conditions du genres:
1. Symétrique: gij = gji.
2. gij de classe ≥ C²
3. dét(gij) ≠ 0 etc ... en fait on impose à gij tout ce qu'il faut pour ne pas avoir des problèmes !!!
Exemples de l'espace Riemannien
l'espace de Minkowski (V,ds²) où
ds² = (dx0)² - (dx1)² -(dx2)² -(dx3)²
x0 = ct , x1 = x , x2 = y , x3 = z
La tranformation de Lorentz
x' 0 = γx0 - γβx1
x' 1 = -γβx0 + γx1
x' 2 = x2
x' 3 = x3
En notation tensorielle
Où L est la matirce de Lorentz
l'espace de Schwarzschild (V,ds²) où
ds² = ea(dx0)² - eb(dx1)² -r²(dx2)² -r²sin(θ)²(dx3)²
x0 = ct , x1 = r , x2 = θ , x3 = φ
Commentaire
Une variété V est en fait un ensemble de morceaux de Rn collés entre eux, et chaque morceau gèré (paramétré) par un système de coordonnées curviligne xi .
en chaque point attachés plein de vecteurs, tenseurs .... et on veut faire des calculs sur ces objets. Pour faire des calculs le plus simple c'est d'attacher en chaque point de V un esv euclidien noté TM et les calculs se font dans cet esv. dim TM = dim V
Pour comprendre, imaginez votre maison composée de plusieurs pièces: la cusine, le salon, la salle de bain, les chambres .... dans chaque pièces disposée une calculatrice. Quand vous êtes dans la salle de bain pour calculer vous prenez la calculatrice sur place et faites des calculs, puis quand vous êtes au salon, pareil pour caculer vous prenez la calculatrice du salon et faites des calculs .... Bien que les calculatrices sont toutes différentes mais peu importe l'essentiel c'est que vous arrivez à calculer !!! Tel est l'espace de Riemann
maison = Variété
pièce = morceau de Rn
calculatrice = métrique gi j
Dans un esv euclidien: votre maison a une seule pièce ! une seule calculatrice !! maison = esv
calculatrice = δi j
[1]
Accueil
DMJ: 19/07/2018