Coordonnées cartésiennes
On se donne un espace R-euclidien E et une base ci (i=0,1,2,...,n) la base ci se nomme la base cartésienne. Soit E° l'espace affine associé à E avec un point O comme
origine. Soit (O,ci) le repère associé à la base ci.
Un point M de E° est répéré par n+1 coordonnées ui relativement à (O,ci), par définition les ui s'appellent coordonnées cartésiennes.
Coordonnées curvilignes

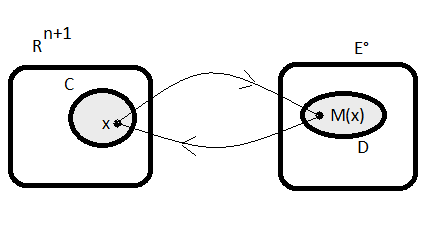
Soient C un morceau de Rn+1 (une partie de Rn+1),
D un morceau de E° (une partie de E°)
et f(x) une bijection de C dans D et de classe ≥ C2
f: C -> D
x -> f(x) = M∈D
avec
x = xi = (x0,x1, ..., xn) et f = fk = (f0,f1, ..., fn)
M(u0,u1,...,un), un point de D , en coordonnées cartésiennes uk = (u0,u1, ...,un)
f(x) = M
f(xi) = M
fk(xi) = uk
Nous dirons que les xi = (x0,x1, ..., xn) consituent un système de coordonnées curvilignes de D
Autrement dit un système de coordonnées curvilignes xi = (x0,x1, ..., xn), est la donnée de n+1 fonctions fk(xi) de variables xi telles que
uk = fk(xi)
Les fonctions fk seront notées aussi uk ; pour dire que les uk sont en fonction des xi
uk = uk(xi)
Càd les coordonnées cartésiennes sont en fonction des paramètres xi et le point M(u0,u1, ...,un), devient maintenant M(x0,x1, ...,xn),
On note aussi
M=M(u0,u1, ...,un) , pour dire que M est en fonction des ui
M=M(x0,x1, ...,xn) , pour dire que M est en fonction des xi
par exp pour notre espace R3 , soit M(x,y,z) un point de R3 , en coordonnées cartésiennes (x,y,z) . un système de coordonnées curvilignes (r,θ,h) est la donnée de 3 fonctions (de C sur D) de variables r,θ,h telles que
x = x(r,θ,h) = r cosθ
y = y(r,θ,h) = r sinθ
z = z(r,θ,h) = h
le point M(x,y,z) devient maintenant M(r,θ,h)
le système est bijectif (de C sur D) on peut donc l'inverser
r=r(x,y,z)
θ=θ(x,y,z)
h=h(x,y,z)
De même par exp:
un système de coordonnées curvilignes (r,θ,Φ)
x = x(r,θ,Φ) = r cosθ sinΦ
y = y(r,θ,Φ) = r sinθ sinΦ
z = z(r,θ,Φ) = r cosΦ
le point M(x,y,z) devient maintenant M(r,θ,Φ)
le système est bijectif (de C sur D) bien sûr.
r=r(x,y,z)
θ=θ(x,y,z)
Φ=Φ(x,y,z)
1 2 [3] 4 5 6
Accueil
DMJ: 19/07/2018